普林斯顿大学研究人员开发出一种新的方法来建造软体机器人
导读:当我们想到机器人时,我们会条件反射到由刚性塑料或金属制成的机器,如通常在工厂环境中使用的类型。
通常情况下,当我们想到机器人时,我们会条件反射到由刚性塑料或金属制成的机器,如通常在工厂环境中使用的类型。虽然刚性机器人确实有其用武之地,但在有些情况下,软性机器人也更有用。今天,大量的研究正被投入到创建软体机器人中,普林斯顿大学的研究人员发明了一种新的方法来制造它,这被称为泡沫铸造。

大学的研究人员将他们的方法描述为利用"花式气球",这种气球在充满空气时可以预测地改变形状。他们的新方法是将气泡注入液体聚合物中,使材料凝固并充气,使其能够弯曲和移动。利用这种方法,研究人员已经创造了抓手、拍打的鱼尾和其他装置,最终目标是利用他们的新方法来创造新型的软体机器人。
软体机器人在某些情况下特别有用,如挑选订单并将其放入箱子和其他任务。软体机器人也被认为更适合于它们将与人类一起操作的情况。刚性机器人给人类带来了巨大的伤害风险,而利用软性机器人则可以消除这种风险。刚性机器人通常也无法处理特别脆弱的物品,如水果、蔬菜或鸡蛋。
软体机器人在未来也有望在医疗保健领域占有一席之地,其潜在的使用场景包括帮助康复的可穿戴外衣,等等。设计软体机器人最困难的方面之一是如何控制其拉伸和变形的方式。软体机器人的拉伸和变形方式控制着它们的运动方式,而且它们拥有以多种方式移动和扩展的潜力。
普林斯顿大学创造的方法依赖于一种叫做弹性体的液体聚合物。弹性体冷却后成为一种橡胶和弹性材料,并通过注射到一个模具中而被塑造。该模具可以有无数种形状,包括简单的饮管或复杂的形状,如螺旋形和其他。接下来,研究人员将空气注入液体弹性材料,形成一个长长的气泡,扩大模具的长度。
重力使气泡上升到顶部,弹性体排到模具的底部,一旦它变硬,就可以取出来,用空气进行充气。当用空气充气时,有气泡的一面会伸展并卷曲到较厚的底座上。软体机器人如何变形是通过控制在固化过程中允许多少时间排气来控制的,这样可以让弹性体更多地固化,在顶部形成更薄的薄膜。
这层薄膜越薄,充气时发生的拉伸就越多,带来更多的弯曲能力。研究人员可以控制各种因素,包括弹性材料在模具中冷却的厚度,弹性材料沉降到模具底部的速度,以及允许固化的时间,这些都决定了弹性材料在完成后如何移动,流体力学正在为他们做这些工作。
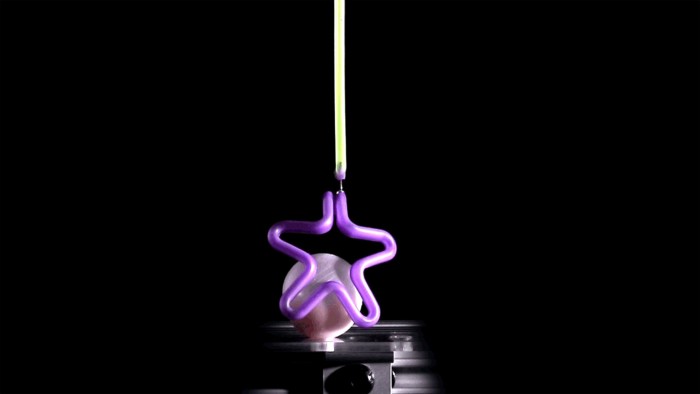
其中一个更有趣的设计是上图中的星形。当它被充气时,星形的手臂创造了一个有效的抓手,能够抓住物体进行提升。研究人员还设计了能够抓取黑莓的软手,一个像肌肉一样收缩的线圈,以及能够在空气作用下单独卷曲的手指。研究人员指出,他们可以使用他们所说的任何人都可以使用的方程式来预测一个形状将如何移动。还值得注意的是,他们的方法不需要3D打印机或其他昂贵的工具。