科学家开发动力型“水下滑翔机” 但没有外部推进或转向系统
导读:当科学家希望远距离收集海洋学数据,但同时又不干扰海洋生物时,往往使用自主“水下滑翔机”。
据外媒New Atlas报道,当科学家希望远距离收集海洋学数据,但同时又不干扰海洋生物时,往往使用自主“水下滑翔机”。科学家近日研发出一种新的号称具有高度机动性的“水下滑翔机”,但它却没有外部推进或转向系统。
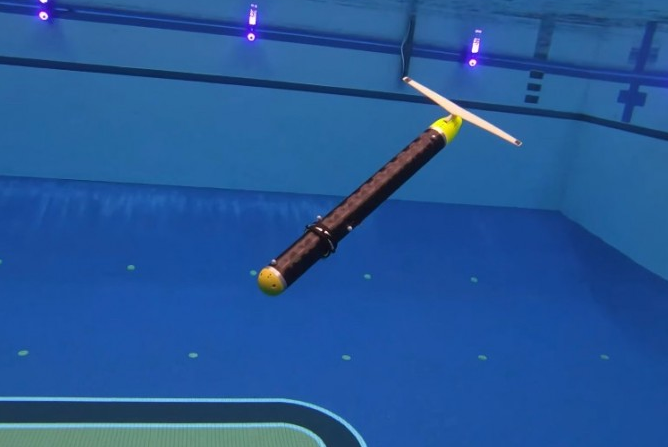
由普渡大学一个团队开发的鱼雷形自主水下航行器(AUV)被称为 “用于实践调查工程的研究导向型水下滑翔机”--简称ROGHIE。它通过将水抽入或抽出一个综合压载舱,改变其浮力,在水体内下降和攀升。这也是一种推进形式,因为该航行器以一定角度上下移动,同时向前移动。
它可以通过电池在机身内前后的电动滑动来控制其上升和下降的角度。这样做可以改变AUV的水平重心,从而改变其俯仰角。此外,轨道安装的电池和其他内部组件可以一起向左舷或右舷倾斜,相对于圆柱形外壳。这就产生了向一侧或另一侧的重量转移,使航行器滚动,从而向该方向转弯。

与其他水下滑翔机一样,ROUGHIE有可能在两次充电之间在海上停留数周甚至数月,利用一些增加的特定任务传感器近乎无声地收集数据。不过,与其他这些航行器不同的是,它的高机动性应该可以让它在相对较近的范围内运行,包括较浅的水域。据其设计者介绍,其他滑翔机的转弯半径约为33英尺(10米),而ROUGHIE可以在10英尺(3米)内转弯。更重要的是,它的制造成本应该是普通自主水下航行器的十分之一。到目前为止,测试仅限于游泳池。
“我们提前用飞行模式对ROUGHIE进行编程,它自主执行这些模式,”副教授Nina Mahmoudian说,她在2012年在密歇根理工大学工作时开始开发AUV。“它可以做标准的锯齿形上下运动,以直线行驶,但它也可以以圆形图案或S形图案行驶,它在海上巡逻时会使用这些图案。事实上,它可以在游泳池的狭小环境中执行这些任务,除了内部驱动之外,什么都不用做,这令人印象深刻。”
有关该技术的论文最近发表在《传感器》杂志上。