MIT的RoboGrammar系统有助于为机器人设计选择最适合的地形
来源:cnBeta.COM 发布时间: 2020-12-03 09:43:47 编辑:Emily
导读:据外媒SlashGear报道,有几种方法可以确定哪种机器人设计可被用于最有效地穿越各种地形。
据外媒SlashGear报道,有几种方法可以确定哪种机器人设计可被用于最有效地穿越各种地形。最耗时的方法是简单地制造每一个机器人的变体,并在现实世界中进行测试。麻省理工学院(MIT)开发了一个名为RoboGrammar的系统,可以虚拟测试各种机器人设计,并确定哪种机器人最适合穿越特定类型的地形。
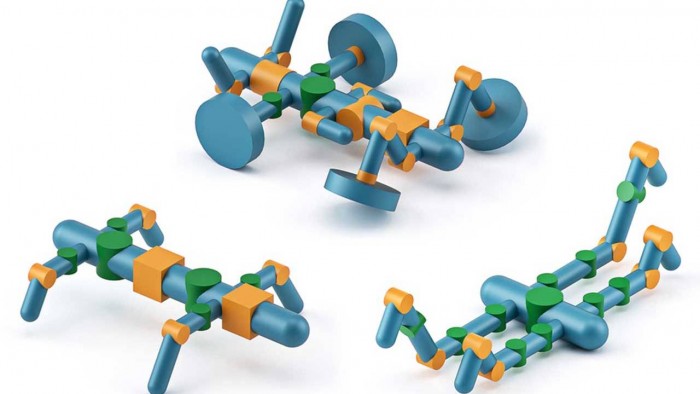
首先,研究人员要“告诉”计算机系统他们身边摆放的机器人零件,包括轮子、关节等东西。研究人员把机器人需要穿越的地形类型输入,RoboGrammar就会完成剩下的工作。计算机系统会生成一个优化的结构以及控制机器人所需的程序。
研究论文的主要作者、麻省理工学院博士生Allen Zhao表示,机器人设计是一个“非常手动的过程”,并指出RoboGrammar是一种开发 “新的、更有创造性的机器人设计 ”的方法。Allen表示,通常人类-机器人设计师在需要了解穿越各种地形的情况时,会转向四足机器人等机器人上,但研究人员想知道这是否是最佳设计。
RoboGrammar是作为一个计算机模型来设计机器人的,因为该系统并没有过多地受到之前传统的影响。虽然创造性是计算机系统所希望的,但也有一些规则存在。该团队开发了他们所谓的“图形语法”。他们表示,如果计算机系统只是简单地连接零件和任意的方式,其结果是零件的混乱。这些规则是为了确保计算机生成的设计能够在基本层面上运行。控制系统的规则特别受到节肢动物的启发。
相关资讯