科学家研发微型磁性机器人 可更高效管理微流控样品
来源:cnBeta.COM 发布时间: 2020-02-28 15:12:44 编辑:Emily
导读:从事微流控(Microfluid)技术研发的科学家通常依靠大型笨拙的机器来管理样品,不过在未来这项管理工作可以交给微型机器人处理,而且能够大幅提升处理效率。
从事微流控(Microfluid)技术研发的科学家通常依靠大型笨拙的机器来管理样品,不过在未来这项管理工作可以交给微型机器人处理,而且能够大幅提升处理效率。
加利福尼亚大学洛杉矶分校(UCLA)的工程师正在朝着这样的未来努力,他们已经开发了一组小型圆盘形机器,其功能类似于“仓库机器人”,可以非常精确地移动和沉积微小的液滴。
这项研究的资深作者萨姆·埃米纳尼亚德(Sam Emaminejad)表示:“我们受到网络移动机器人系统对制造,存储和物流等行业变革性影响的启发,例如那些用于分拣和运输包裹的亚马逊仓储系统。因此,我们着手在微流控环境中实现相同水平的自动化和移动性。但是,我们的“仓库”要小得多,大约只有您的手掌大小,而我们的货物(液滴)则只有十分之几毫米。”
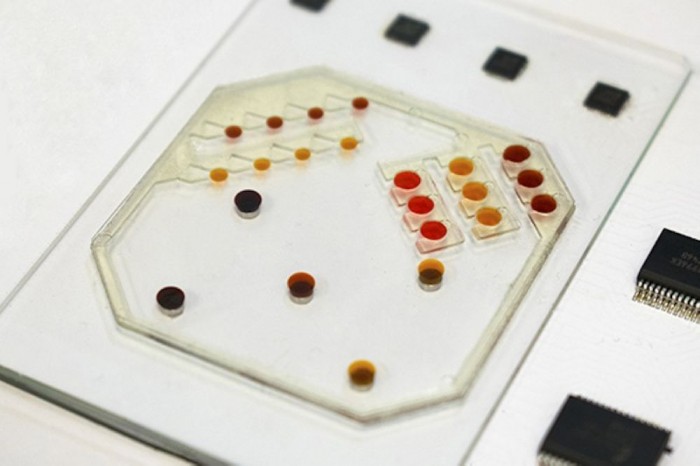
这项研究的测试面积约为索引卡(12.5cm*9.5cm的卡片)大小,并配有内部结构和测试托盘,可容纳少量液体。机器人的直径约为2毫米(0.8英寸),并由集成在平台中的电磁砖操纵,这些电磁砖以预定的路径以每秒10厘米(4英寸)的速度拖拉它们。
该论文的主要作者余文卓(Wenzhuo Yu,音译)表示:“我们设定了打开和关闭瓷砖的时间和位置,以引导铁机器人通过它们的指定路线。这使我们可以让多个机器人在同一空间中以相对较快的速度工作,以高效地完成任务。”
该小组的研究成果发表在《科学机器人》杂志上,而您可以在下面的动图中看到这些微型机器人的运行情况。