科学家开发柔性机器人ElectroSkin:可模仿蜗牛爬墙壁
来源:cnBeta.COM 发布时间: 2019-11-21 14:43:41 编辑:Emily
导读:来自布里斯托大学的科学团队将这种特性融入到现代化机器人,制造了一种小型、有弹性的柔性机器人ElectroSkin。
从毛毛虫和蜗牛上获得灵感,来自布里斯托大学的科学团队将这种特性融入到现代化机器人,制造了一种小型、有弹性的柔性机器人ElectroSkin。团队已经设想了ElectroSkin的诸多未来应用场景,其中包括部署在危险区域,甚至是作为自动墙壁清洁器。
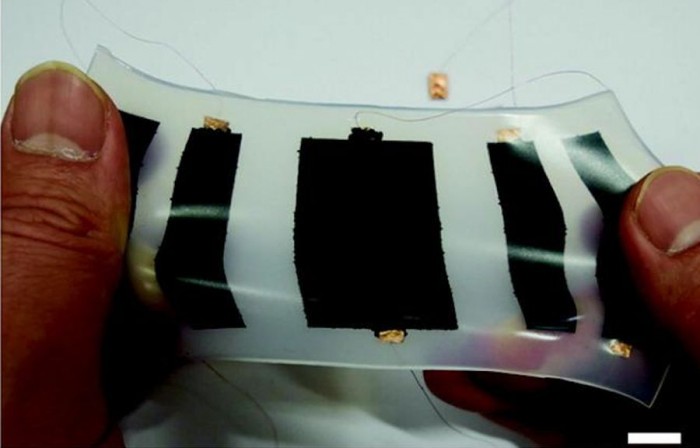
这款柔性机器人拥有非常广阔的市场应用前景,能够模仿蜗牛的方式在墙壁上蠕动上爬。通常来说此类机器人主要使用电粘力(electro-adhesion)来实现,并依靠静电力挂载垂直表面上。ElectroSkin虽然也使用了相同的技术,不过科研团队首次将这项技术和自我运动(self-locomotion)相结合,通过人造肌肉来模仿蜗牛的膨胀和收缩可以往上爬。
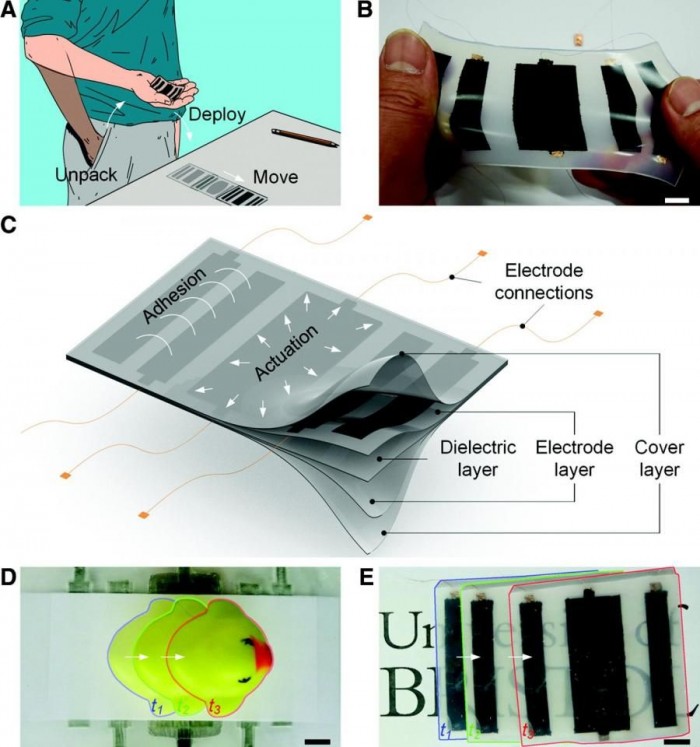
由于具有弹性,柔韧性,ElectroSkin可以卷起并塞入口袋中,在展开状态下可以扔到任意表面进行工作。在未来的开发中,科学团队设想如果装备了不同的传感器和附件,该机器人可以对墙壁、天花板进行清洁;爬进倒塌的建筑物内在人力所不能到达的地方传输视频信号。
该小组的研究成果发表在《Soft Robotics.》杂志上。
资料来源:布里斯托大学