RoboBee成为首个利用柔性肌肉实现受控飞行的微型机器人
导读:哈佛大学的RoboBee项目一直处于微型机器人技术的前沿,他们研发的微型机器能够飞行、游泳、悬停、栖息并摆脱束缚。
据外媒报道,多年来,哈佛大学的RoboBee项目一直处于微型机器人技术的前沿,他们研发的微型机器能够飞行、游泳、悬停、栖息并摆脱束缚。现在,在一项新的发展中,RoboBee又成为了首个使用软致动器--让机器运动的人造肌肉--实现受控飞行的微型机器人。
软致动器的主要好处是提高了回弹性--得益于小机器人的低质量其已经具备了这种能力。而拥有柔软的人造肌肉意味着RoboBee在撞到墙、掉在地板或撞到其他机器蜂时避免受伤。
虽然明白这种制动器所带来的好处,但其制造难点是如何打造出足够强大的软致动器来实现飞行并且与此同时给予微型机器人足够的控制来实现悬停。哈佛最新的这个软致动器技术就被认为是第一个取得这些突破的。
最新的进展是由哈佛大学约翰·A·保尔森工程与应用科学学院(SEAS)和威斯生物工程研究所共同完成的。研究人员在现有的电动软致动器技术的基础上使用了100毫克弹性体,当暴露在电场中时,这些弹性体就会发生变形。
据了解,研究人员正是通过提高电场作用下电极的导电性才能让微型机器人利用上刚性致动器的性能并实现每公斤600瓦的功率密度。
 软致动器的动画展示
软致动器的动画展示
另外,研究人员还获得了更好的稳定性以此来建造出一个轻型机身来容纳下微型机器人,其用了一根线来防止致动器弯曲--而这是软人造肌肉历来都不愿去尝试的。
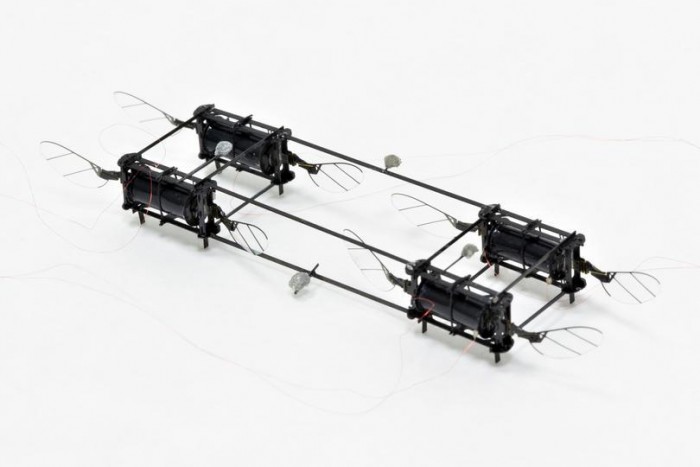
研究人员在一个双翼RoboBee和四翼RoboBee上展示了这项技术。其中,双翼版可以从地面起飞,而四翼版则在障碍重重的环境下遇到数次碰撞后仍可以继续飞行。
此外,他们甚至还让两个四翼模型碰撞以此来证明它们即便在相撞后仍能继续飞行。他们还用四个致动器建立了一个八翼RoboBee。
研究人员希望这项技术未来能在搜索和救援工作中得到应用,有可能让机器人飞进瓦砾和密闭空间。
他们表示,软执行器易于组装和更换,但他们下一个面临的挑战是如何提高它们的效率,如果这个能够解决,那么按照高级研究作者Robert Wood的说法,“我们可以制造的机器人的极限是天空。”
相关研究报告已发表在《自然》上。