MIT机器人控制马甲助重物搬抬机器人保持平衡
导读:麻省理工学院(MIT)和伊利诺伊大学香槟分校的工程师们正在开发一种遥控机器人,这种机器人通过使用一种特殊的操作背心来获取跟人类类似的平衡和反射能力。
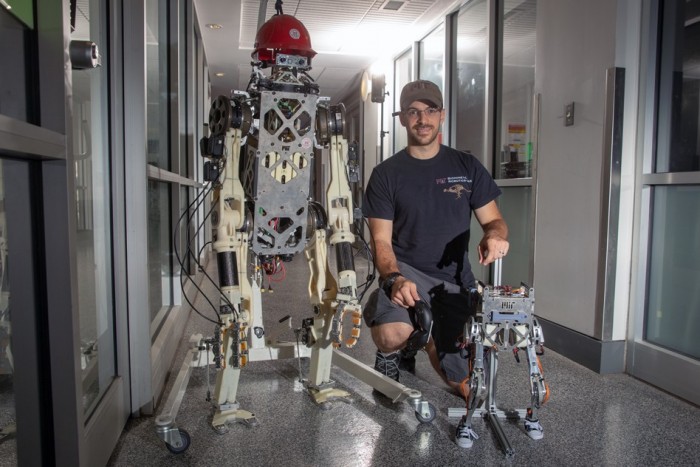
据外媒报道,麻省理工学院(MIT)和伊利诺伊大学香槟分校的工程师们正在开发一种遥控机器人,这种机器人通过使用一种特殊的操作背心来获取跟人类类似的平衡和反射能力。个被称为小型高效机器人机构和机电系统(HERMES)的小型双足机器人个头只有成年人的三分之一,它可以奔跑、跳跃并同步还原操作者的大部分动作。
当在面对灾难时,机器人作为反应者和救援者有着很多明显的优势,但当要求这些人形机器人消防员冲进倒塌的燃烧建筑物之前则还有很长的一段路要走。其中最大的问题之一就是,虽然它们现在可以完成跑、跳和后空翻等动作,但它们在平衡方面仍非常糟糕。因此,如果一个两足机器人能够在这一领域取得突破性进展那么绝对是个好消息。
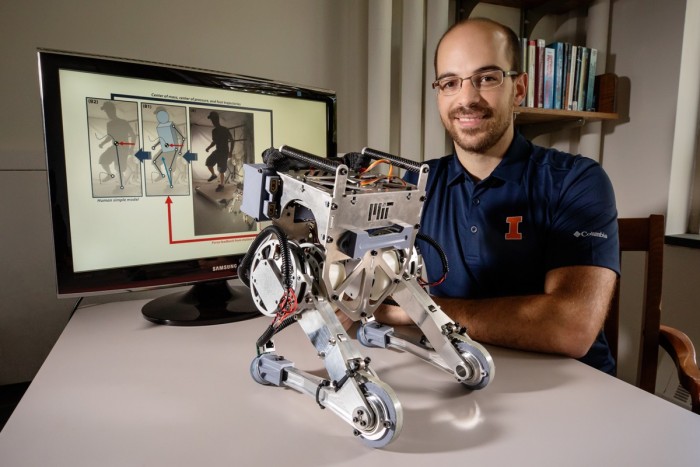
为了让两足机器人保持平衡并在这个基础上自行处理激烈运动,伊利诺伊大学机械科学与工程教授Joao Ramos和MIT教授Sangbae Kim开发了这套HERMES。
Ramos表示,他们研发的动力来源于2011年日本东北部发生的地震、海啸以及随之而来的灾难性福岛第一核电站泄露事件,“我们认为,如果一个机器人能够在灾难发生后进入发电厂,事情可能会以不同的方式结束。这一事件为机器人界敲响了警钟。”

据了解,HERMES的关键是强制反馈机制。操作员将穿上一件马甲,通过它不仅可以让机器人跟操作员实现同步移动而且还能让操作员几乎实时地感受到作用在机器人身上的力并本能地做出反应--即跟机器共享人类的平衡感。当机器人失去平衡时,操作员会条件反射地进行补偿,机器亦是如此。
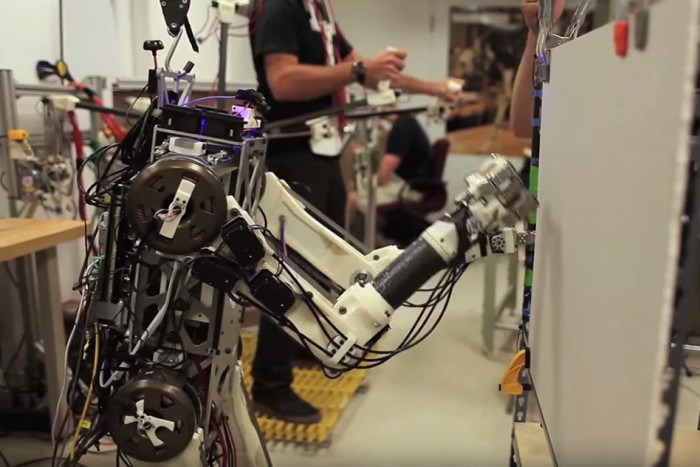
目前的Little HERMES还需要有线控制,很显然,研究人员下一步要做的就是引入无线控制并扩大强制反馈技术的使用范围。Ramos表示:“我们还计划开发机器人到人的力量反馈装置,它用于身体的其他部位比如脚和手。此外,我们截至目前开发的所有东西将不局限于双足机器人;这些技术都可以很容易地转移到其他移动系统,比如四足机器人和轮式机器人。”
相关研究报告已发表在《Science Robotics》上。