乐高积木+3D打印:研究团队希望用基础元素来构建复杂机器人
导读:不管生物的外形多么不同,其归根结底都是由一些基本的元素组成。基于这方面的灵感,麻省理工学院教授 Neil Gershenfeld 提出了“数字材料”的概念。
不管生物的外形多么不同,其归根结底都是由一些基本的元素组成。基于这方面的灵感,麻省理工学院教授 Neil Gershenfeld 提出了“数字材料”的概念。这是一种独立、有限的部件组合,能够像一种小型的 Erector 套装一样,通过少量的多用途零件,来制造、组装无限种类的微型机器人。
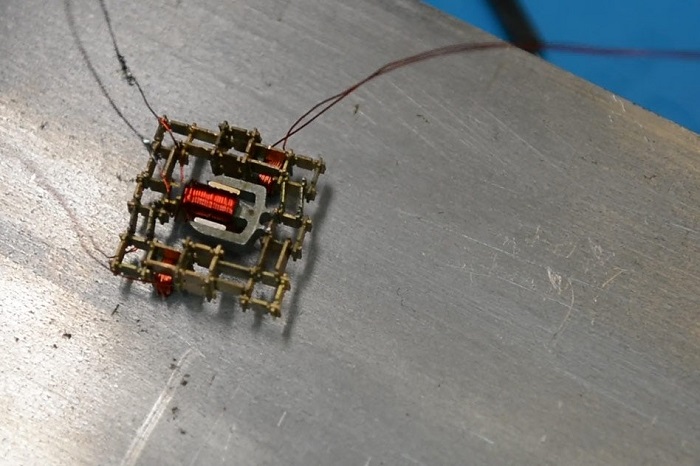
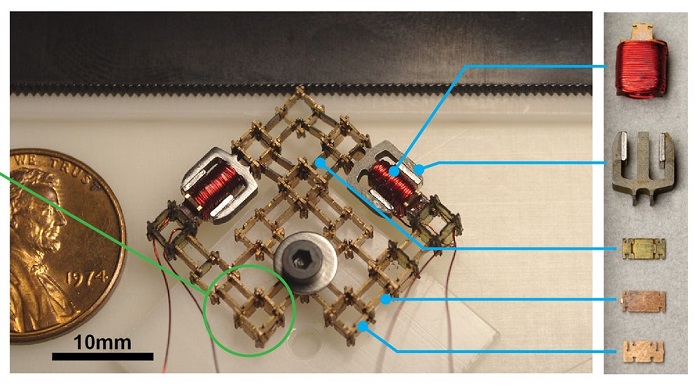
 (图自:Will Langford / MIT,via New Atlas)
(图自:Will Langford / MIT,via New Atlas)
在本周于芬兰赫尔辛基举办的小型操作自动化与机器人国际会议(MARSS)上,Gershenfeld 发表了由他与 MIT 研究生 Will Langford 共同撰写的这篇方法性论文。
会上,团队展示了一款小型步进电机的组装和部署,以及一个能够使用五种不同零件,来设计转动机器齿轮的电机。这些由五部分组成的设计,包括了毫米级的刚性和柔性部件、线圈、以及磁性元件。
通过多种配置的标准连接器,这些部件可以互相连接,组装成一个特定任务的机器人,并且通过更多组件进行扩展。或者轻松拆卸与重新利用这些部件,以便打造不同任务的新机器人。
如果将规模进一步扩大,这种方法可以有效地减少从头开始设计和构建新机器人的昂贵过程,为每种应用定制所需的零件。不过研究团队面对的挑战,不仅仅是这些多功能组件的外形和用途。
Gershenfeld 表示,真正的挑战,在于如何制造和组装它们,以满足最终的设计需求。其最终目标是让机器人通过这些部件,组装出自身的一个副本。
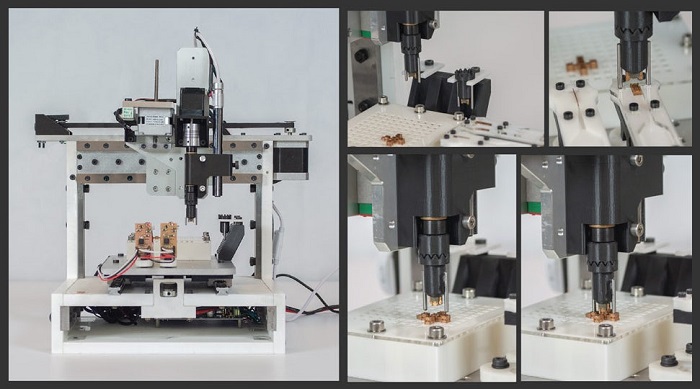
为此,Langford 设计了一款类似于 3D 打印机 + 乐高积木的混搭设备,以及常见的用于创建电子电路板和拾取和放置仪器。该设备采用了数字设计,能够通过相关组件来创建新的机器。
作为互操作性的基础,这种“自动化”在很大程度上取决于集合中每个分立元件的简单性和规律性,同时考虑它的可靠性与可扩展性等关键因素。
说到规模,这种类似乐高积木的装配系统,潜在应用不仅仅局限于微型机器人。因为每个零部件都可以适当的升级或降级,以适应最终的目的。
为证明这一点,团队希望制作基于纳米尺度的纳米机器人,以及规模数米的 MegaRobots 。
这项工作仍在进行之中,且随着更多独特的部件设计,它很可能像生物最基础组成元素的氨基酸那样,达到数十个的目标。而未来的可行性,将呈现指数级的增长。