南加州大学研究人员开发了四个翅膀的全新微型蜜蜂机器人
来源:cnBeta.COM 发布时间: 2019-05-17 08:58:19 编辑:Emily
导读:南加州大学(USC)的研究人员致力于解决微型昆虫机器人的最后一个问题,即稳定性,他们再次从昆虫世界中汲取灵感。
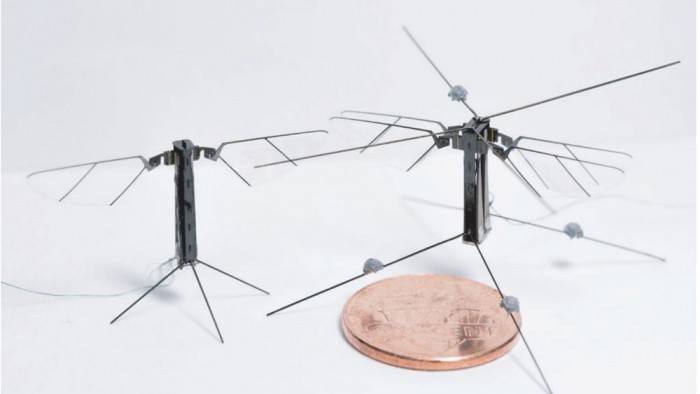
南加州大学(USC)的研究人员致力于解决微型昆虫机器人的最后一个问题,即稳定性,他们再次从昆虫世界中汲取灵感。南加州大学的研究小组表示,为了能够增加偏航控制,蜜蜂机器人确实需要四个翅膀,就像真正的昆虫一样,但这有可能增加机器人的重量。机器人身上的驱动器已经占到了80毫克总量的50毫克,再加上两个翅膀会使微型蜜蜂机器人太重而不能飞行。
所以,南加州大学的团队制造了更轻、更好的执行器。之前的机器人采用双晶片驱动器,由三层组成。两个外压电层通过一个信号交替收缩,从而前后弯曲内层,从而像昆虫翅膀一样拍打。相比之下,USC团队创建了单变形驱动器。它们仅使用一条压电材料,它来回移动无源层。由此产生的飞行控制改进意味着现在的蜜蜂机器人能够沿着路径行进并避开障碍物。而且因为这些单压电晶片执行器更简单,所以它们的制造成本也更低。
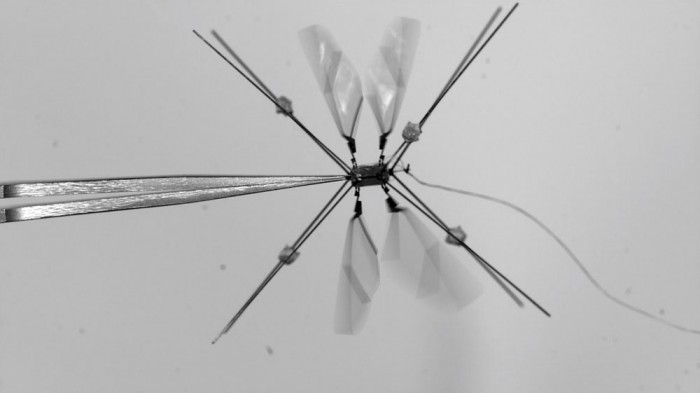
USC团队研发的单变形驱动器的重量是双形驱动器的一半,这意味着即使有四个33毫米(1.3英寸)长的翅膀,新款蜜蜂机器人的重量也只有95毫克(0.0033盎司)。而且,由于整个机器人的负载分布在四个翅膀上,而不是两个翅膀上,所以新款蜜蜂机器人的耐久性和预期寿命预计要比之前2个翅膀的机器人要长得多。