HAMR微型机器人现在可以在水上或水下行走
来源:cnBeta.COM 发布时间: 2018-07-04 09:14:33 编辑:Emily
导读:如果你是受昆虫启发的机器人的粉丝,那么你可能喜欢RoboBee、VelociRoACH和哈佛大学的HAMR等创作。
据外媒New Atlas报道,如果你是受昆虫启发的机器人的粉丝,那么你可能喜欢RoboBee、VelociRoACH和哈佛大学的HAMR等创作。现在哈佛大学的HAMR微型机器人已经可以穿越水面,自行下沉,并根据指令在水下行走。
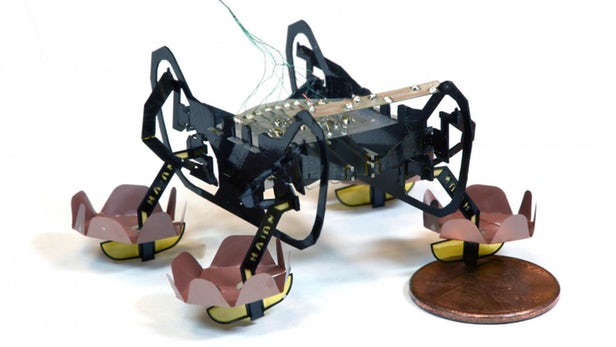
哈佛大学研究人员于2013年首次宣布了系绳驱动/控制的HAMR(哈佛动态微型机器人)机器人,其原始版本长度仅为4.4厘米,并且可以以高达每秒8.4倍自己身体长度的的最大速度沿着地面移动。它的结构灵感来自立体书,并将23个微观材料层夹在一起,然后将它们激光切割成所需的图案。
最新版本的HAMR仅重1.65克,并在其所有四条腿上都配有脚垫。当机器人进入水中时,这些垫提供表面张力引起的浮力,防止其下沉(它甚至可以携带1.44克的有效载荷)。HAMR能以游泳步态及高达10Hertz的频率移动它的腿。

但是,如果需要,HAMR可以通过焊盘的下侧向水施加电流。这导致称为电润湿的过程,其中施加的电压减小了物体与水面之间的接触角。结果,表面张力被破坏,机器人下沉。随后它可以沿着底部行走,使用与在陆地上行走相同的步态。一种叫做Parylene的聚合物的防水涂层可以防止它在短时间内短路。
当它离开水面的时候,这个微小的轻型机器人需要一些帮助。为此,新的两栖版本的HAMR具有更坚固的传动以及前腿上的软垫,它们共同用于增加其有效载荷能力并在爬升时重新分配摩擦力。这种改变使其能够爬出水面。研究人员未来可能利用壁虎式粘合剂或跳跃机构等技术,希望机器人能够在不使用坡道的情况下离开水面。
HAMR的最新版本在最近发表在《自然·通讯》期刊上的论文中有所描述。